")
")
Mini station météo APRS LoRa
- Détails
- Affichages : 57
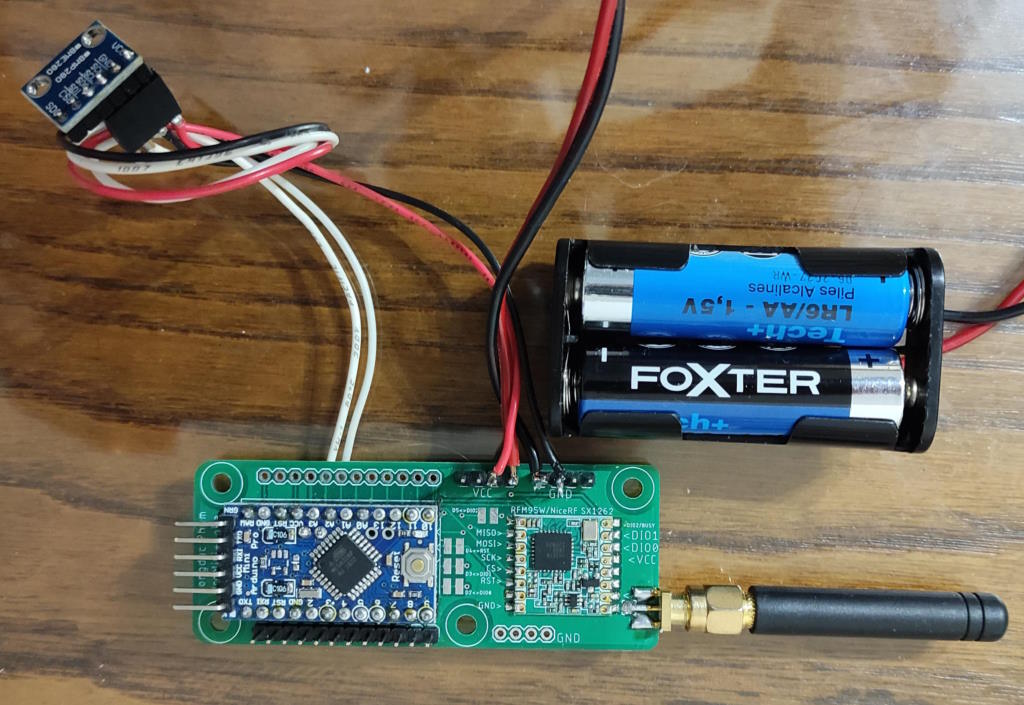 |
Ayant acquis une certaine expérience lors de la réalisation de mon projet de station météo décrite dans l'article Station météo APRS LoRa, et ayant quelques modules LoRa RFM95W, j'ai décidé de faire un test de faisabilité pour une mini station météo très faible consommation. Les premiers résultats étant très encourageants, j'ai poursuivi mon projet jusqu'à obtenir un projet mature. |
Programmes de test pour modules LoRa
- Détails
- Affichages : 664
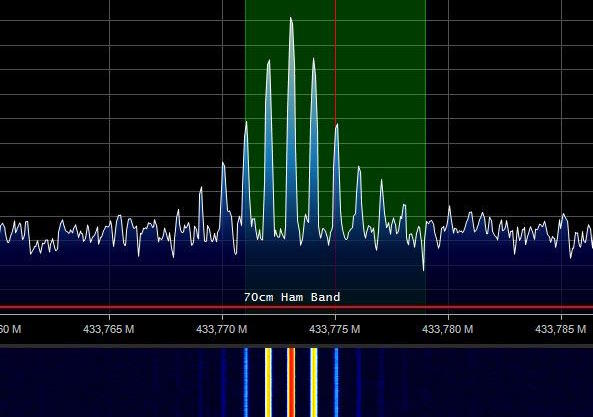 |
Les modules LoRa de Lilygo sont annoncés pour fournir une puissance à la sortie de l'émetteur de +20dBm (100mW). Ayant eu un module qui me semblait suspect, j'ai été confronté au problème de la mesure de puissance. Mesurer la puissance d'un signal fugitif comme l'est celui en LoRa n'est pas toujours évident. J'ai donc écrit un petit script qui permet de le faire facilement. J'en ai profité pour en écrire un deuxième pour tester la sensibilité de la réception. J'ai ainsi pu constater qu'aucun de mes modules n'atteignait la puissance annoncée, elle était plutôt de +17dBm. |
Station météo APRS LoRa
- Détails
- Affichages : 3659
 |
Description d'une station météo polyvalente. Caractéristiques : - Réalisée autour d'un module TTGO T3 LoRa 433 MHz - Capteurs de température, pression, humidité, pluviométrie, vitesse et direction du vent. - Protocoles APRS via LoRa, APRS-IS, MQTT et Wunderground via Internet par Wifi. - Wifi par DHCP ou statique. - Afficheur OLED avec ou sans économiseur. - Mises à jour du logiciel par OTA sécurisé par mot de passe. - Serveur Web autonome avec les principales données. - Repli LoRa en cas de panne WiFi ou Internet. - etc... |
iGate APRS LoRa CD2RXU
- Détails
- Affichages : 2939
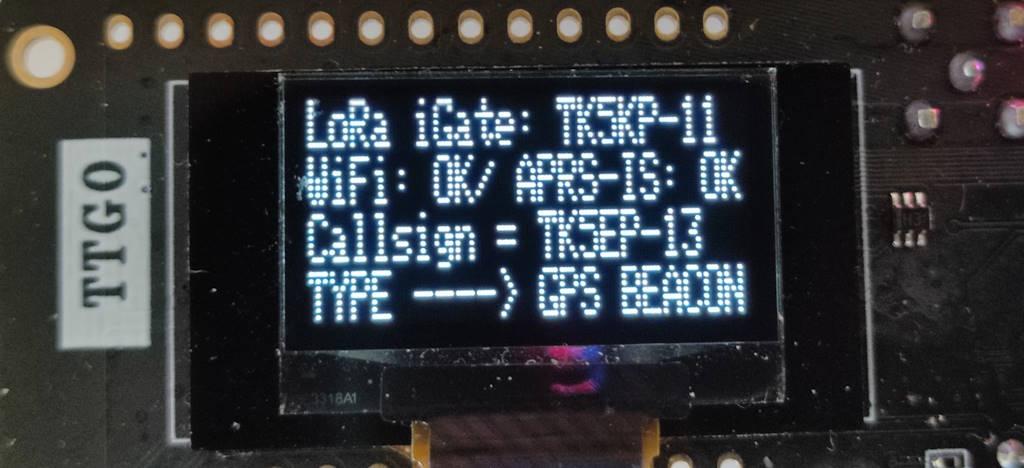 |
Le logiciel iGate LoRa de CD2RXU apporte quelques améliorations notables par rapport à d'autres iGate : - passerelle APRS LoRa classique - passerelle + émetteur LoRa diffusant des infos météo. - digipeater APRS LoRa simplex ou duplex - OTA (mise à jour du logiciel à distance) - mini station météo - configuration multi-WLAN - symboles APRS distincts suivant le mode de la passerelle - etc... |
Tracker APRS LoRa CD2RXU
- Détails
- Affichages : 6264
Il apporte plusieurs améliorations par rapport au logiciel d'origine, notamment : - un menu permettant de choisir entre plusieurs fonctions. - le choix entre différents indicatifs (et icones, par ex. TK5EP-9 voiture, TK5EP-7 piéton, etc...) - la capacité de visualiser la réception d'autres Trackers. - une diminution de la consommation par abaissement de la vitesse du CPU. - la compression des données transmises pour diminuer le temps de transmission d'où diminution de la consommation et du risque de perturbation. - réception de la météo locale - stockage/lecture/suppression des derniers messages reçus. - connexion Bluetooth via TNC et APRSDroid - signalisation par LED de messages reçus et passage en émission - notifications sonores par buzzer externe YL44 - module météo avec BME280 Pour profiter de certaines fonctionnalités, il faut utiliser également son logiciel iGate. Pour plus d'informations sur le logiciel d'origine, le principe de l'APRS et l'utilisation du logiciel Visual Studio Code, consulter mon article OE5BPA LoRa APRS |
UV-998 LEIXEN
- Détails
- Affichages : 6308
 |
Ayant récemment acquis ce petit transceiver mobile bi-bandes VHF/UHF UV-998 de LEIXEN, voici quelques informations. Mesures des caractéristiques Utilisation Programmation Liens L'UV-998 est parfois également nommé VV-998. Merci de me faire part de votre propre expérience afin de compléter cette page... Article écrit le 08/05/2023. |
AllStarLink astuces
- Détails
- Affichages : 4724
| |
Cet article est essentiellement un mémo personnel, mais peut être utile à d'autres. AllStarLink est un réseau de répéteurs radioamateurs, de stations de base distantes et de HotSpots accessibles les uns aux autres via le protocole de voix sur Internet. C'est le logiciel que nous utilisons sur notre réseau privé TKNet et installé sur des Raspberry Pi..
|
Monte Giovanni TK/TK-031 le 02/02/2023
- Détails
- Affichages : 957
 |
Monte Giovanni TK/TK-031 WWlocator : JN42na80 Altitude : 1950 m - gain altitude +350 m - distance 10km A/R 50 QSO 20 m CW 1 S2S +1 DX |
Belle randonnée en raquettes dans une magnifique poudreuse très profonde par endroit.
K3NG Winkeyer
- Détails
- Affichages : 2762
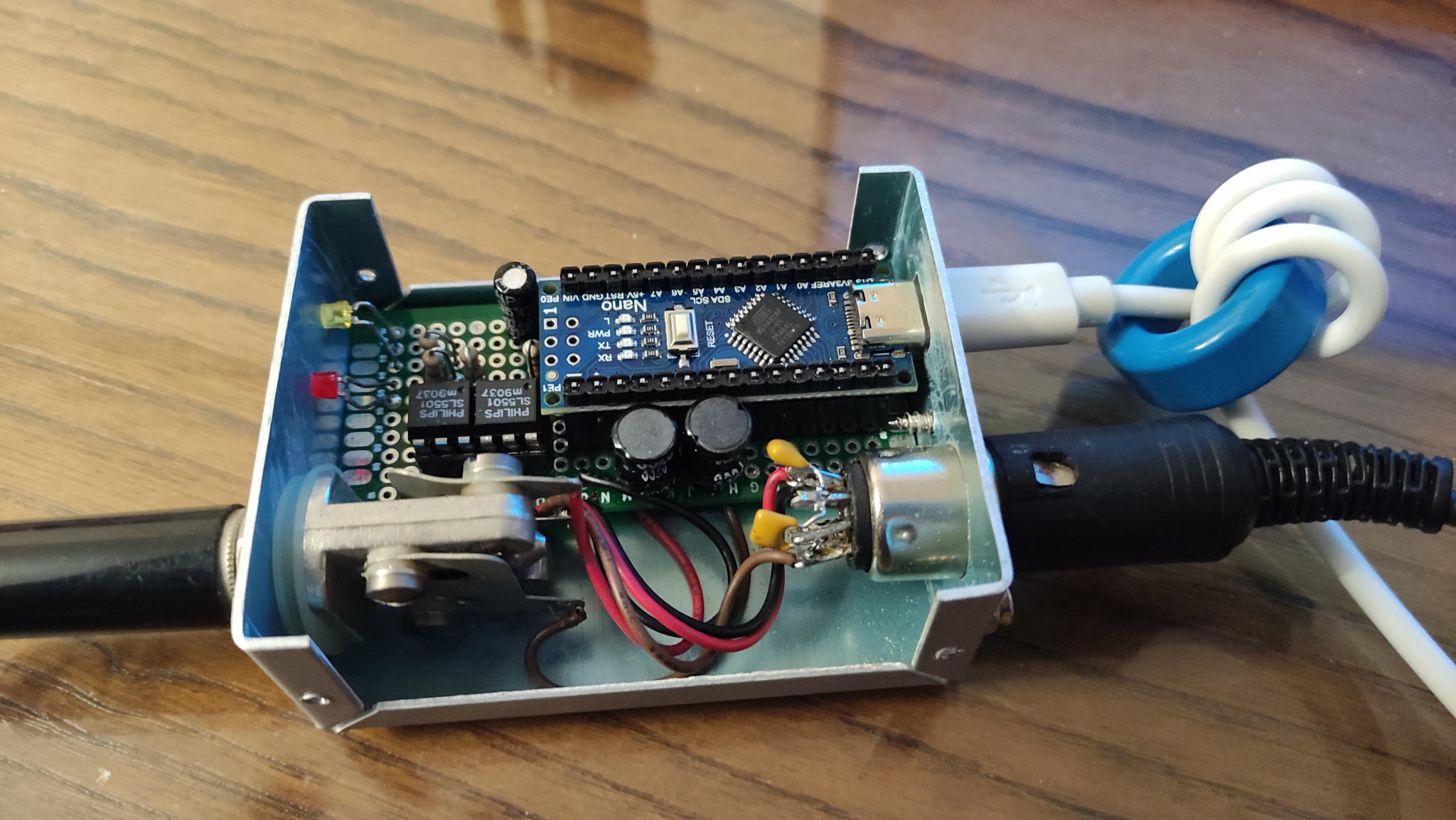 |
Principe KISS (Keep It Simply Stupid) pour la réalisation et paramétrage de ce manipulateur Winkeyer à l'aide d'un Arduino Nano et le logiciel Keyer de K3NG. |
Module régulateur de vitesse de ventilateur
- Détails
- Affichages : 19754
Pour un de mes projets, j'ai commandé sur Aliexpress (voir liens en bas de page) un module de régulation de vitesse de ventilateur.
J'ai galéré comme pas possible avant de comprendre comment programmer ce module ! Les instructions traduites du Chinois sur Aliexpress étant pour le moins mystérieuses :-)
Voici le résultat de mes recherches.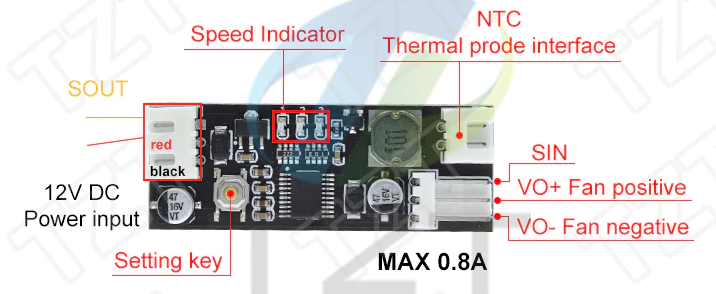
Page 1 sur 5




